01 gennaio 2021 · @mroizofpv
Modalità di volo: Acro vs Stabilizzato
PrincipianteTutorial per volareFirmwareHardwareEsistono sostanzialmente due modalità di volo di un quadricottero. La modalità stabilizzata, anche conosciuta come self-level, e la modalità ACRO, anche conosciuta come modalità rates.
Sono due modi distinti, molto diversi, di pilotare un quadricottero. La modalità stabilizzata è molto più limitata e limitante e tutti i piloti di droni racing pilotano in ACRO, anche perchè pilotare un quad racing in modalità stabilizzata non ha molto senso, se non in situazioni particolari di spazi particolarmente stretti per riprese cinematic.
Che cos’è la modalità stabilizzata?
La modalità stabilizzata è una modalità di volo assistito. Quando lasci andare le levette del roll o del pitch verso il centro infatti, il quadricottero automaticamente torna in posizione neutrale, ovvero piana ed allineata con l’orizzonte. Questo avviene grazie al Flight Controller che analizza i dati di giroscopio e accelerometro presenti sul FC stesso e in pochi millisecondi trasmette ai motori gli impulsi necessari per livellare il tuo quadricottero. È come se ci fosse una mano invisibile che mantenesse il drone sempre livellato ogni volta che non è controllato dal pilota.
Ovviamente perché ciò avvenga, la rotazione del quadricottero sugli assi pitch e roll è limitata dal flight controller fino ad un angolo massimo (generalmente di 55°) di inclinazione, per non permettere al quadricottero di capovolgersi.
Questa modalità su BetaFlight è definita ANGLE
Quando il pilota spinge la levetta del roll a destra ad esempio, il quadricottero in modalità stabilizzata ruota sull’asse del rollio verso destra, soltanto fino ad un certo limite di gradi, dopodichè si blocca automaticamente. Quando il pilota rilascia la levetta al centro, il quadricottero automaticamente torna in posizione piana.
- Utilizza entrambi i sensori Gyro e Accelerometro
- Ritorna in orizzontale in assenza di input dagli stick di pitch e roll.
- Gli input di pitch e roll determinano l’angolo di rotazione del drone (fino al limite imposto dal flight controller)
Cos’è la modalità Acro?
La modalità Acro è anche conosciuta come modalità rates o modalità acrobatica. In modalità Acro il Flight Controller non livella automaticamente il quadricottero, al contrario, il FC mantiene l’angolo di rotazione sugli assi di roll e pitch che hai impostato, anche quando quando lasci andare la levetta della radio al centro. Pertanto, il pilota deve effettuare costantemente regolazioni manuali per non perdere il controllo e schiantarsi a terra.
In modalità ACRO infatti, con gli stick di pitch e roll stai controllando la velocità angolare di rotazione del drone. Ciò significa che se spingi lo stick del Pitch in avanti e lo mantieni in quella direzione, l’elicottero continuerà a ruotare a 360° su quell asse ad una velocità costante, mentre come abbiamo visto, in modalità stabilizzata, la rotazione viene bloccata dal Flight Controller per evitare che il quadricottero si capovolga.
Per tornare in posizione livellata con l’orizzonte quindi il pilota dovrà applicare manualmente una rotazione uguale e contraria a quella trasmessa al drone per effettuare la traslazione precedente. In questo esempio si vede come per tornare in posizione orizzontale, ad una rotazione verso destra iniziale, viene applicata una rotazione contraria verso sinistra sull’asse del roll
- Utilizza solo il sensore giroscopico
- Richiede una correzione manuale della rotazione per tornare al livello piano orizzontale
- Gli input di pitch e roll determinano la velocità con cui ll quadricottero ruota sull’asse
E la modalità Horizon?
La modalità Horizon presente su firmware come Betaflight è una via di mezzo tra Angle e Acro. Ovvero, mantenendo gli stick di pitch e roll in una direzione, permette al quadricottero di eseguire una rotazione a 360°, eliminando quindi il limite di rotazione della modalità Angle, tuttavia, quando si rilascia lo stick verso il centro, il quadricottero viene livellato automaticamente dal Flight Controller con l’orizzonte. Rispetto alla modalità Angle, nella modalità Horizon è possibile impostare la velocità della transazione automatica di livellamento, ad esempio riducendola come da esempio qui sotto.
Può avere un senso all’inizio per prendere confidenza con le manovre acrobatiche, tuttavia il livellamento automatico rende l’esperienza di volo sempre molto limitata.
Perchè volare in modalità ACRO?
Se hai acquistato o vuoi acquistare un drone racing, non è certo per volarci in modalità stabilizzata. La modalità stabilizzata è più facile per i principianti, a causa del comportamento prevedibile: lascia andare lo stick e il tuo drone tornerà semplicemente livellato. Ma fidati di noi, la modalità Acro è “l’unico modo” per pilotare un Drone Racing fpv e godere a pieno della libertà dell’FPV.
Sarebbe bene iniziare immediatamente in ACRO, facendo prima ore ed ore di simulatore al PC, perchè sono due stili di guida completamente diversi e se impari a volare in stabilizzato, dovrai poi dimenticare tutto e iniziare da zero.
Se vuoi saperne di più sui simulatori per FPV, potrebbe interessarti questo articolo.
Ecco alcuni dei vantaggi del volo in modalità Acro:
- Hai il controllo totale e molto più fluido del quadricottero. In modalità stabilizzata infatti devi “combattere” costantemente contro il Flight Controller che tenta di raddrizzare il tuo quadricottero ogni qualvolta che torni al centro con la levette del pitchroll. In modalità Acro una volta che hai impostato una traiettoria, le levette servono solo per portare micro correzioni per rendere il volo più preciso, ma il drone seguirà quella traiettoria senza esitazioni.
- La CPU del Flight Controller è meno impegnata in quanto uno dei sensori è disabilitato (l’accelerometro).
- Hai la totale libertà di azione e di manovra nell’aria, puoi compiere evoluzioni di ogni tipo.
Certamente le prime volte sarà difficile, ti sentirai sperduto. Ma alla lunga avrai una grande soddisfazione e ti sentirai davvero come se stessi realizzando qualcosa. Allenati a tempo pieno in modalità ACRO, partendo dal simulatore!
Come abilitare la modalità Acro in Betaflight?
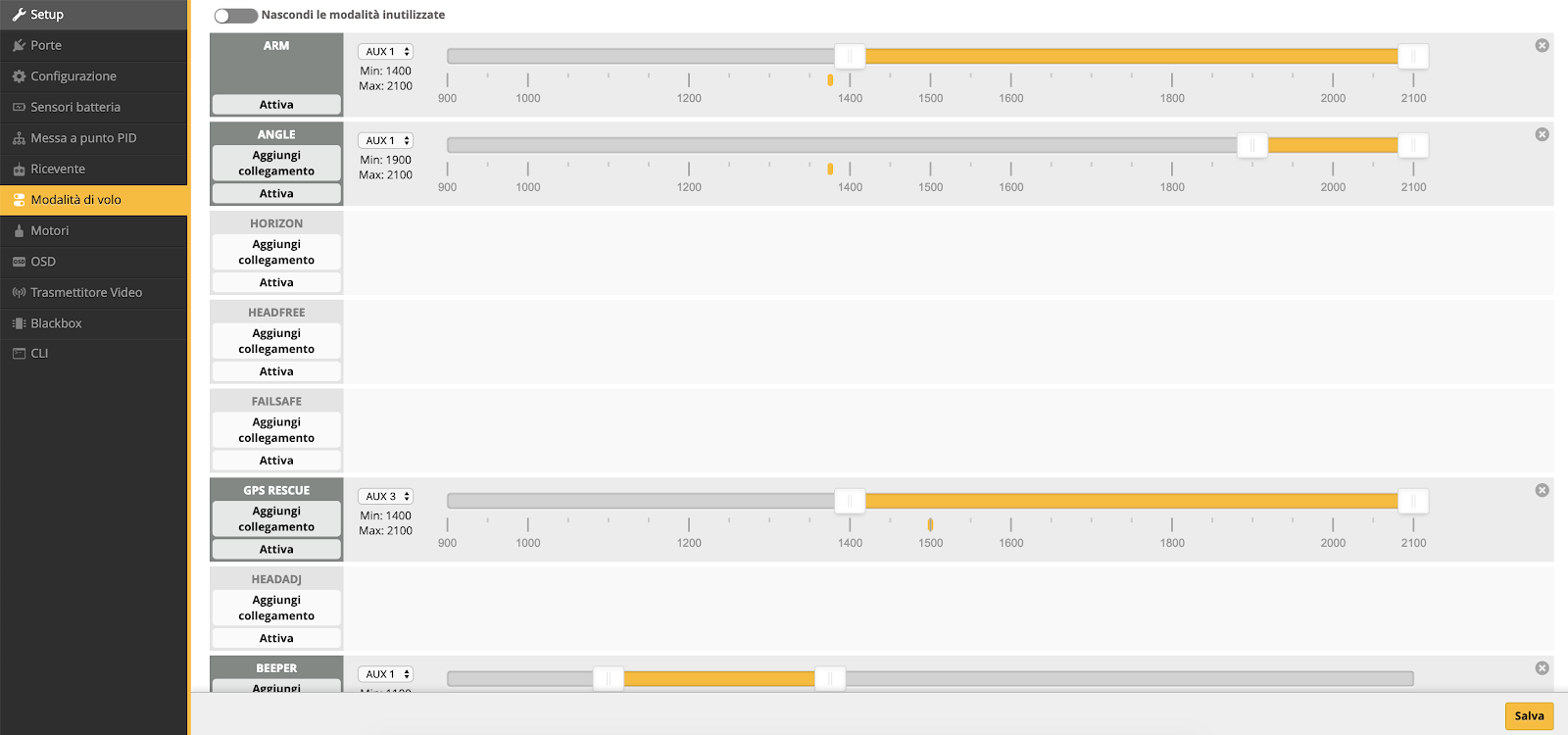
In realtà in Betaflight non esiste la modalità ACRO da selezionare, perchè è quella di default che il quadricottero utilizzerà se non attivi la modalità Angle o Horizon.
Nella sezione modalità di volo quindi assegna semplicemente un interruttore ad ARM e puoi volendo assegnare le modalità Angle o Horizon ad uno stick, sapendo che quando attiverai lo stick in quella posizione, non sarai più in modalità ACRO.
E’ bene comunque attivare sempre la modalità Air Mode sempre quando voli in modalità Acro.
Assicurati di dare un’occhiata al nostro tutorial su come pilotare FPV.
Mr.OIZO FPV
Ho iniziato per curiosità, ho scoperto quello che è molto più di un hobby, una vera e propria passione. FPV is freedom.