TeoriaDelVolo
01 gennaio 2021 · @mroizofpv
Come fa un drone a volare?
Quali sono le leggi fisiche che il quadricottero sfrutta per decollare, muoversi in tutte le direzioni, roteare su se stesso? Come fa un drone a volare? La nostra risposta non sarà propriamente un trattato di fisica, ma cercheremo di capire comunque per quali leggi dell’aereodinamica il quadricottero riesce a librarsi nell’aria.
01 gennaio 2021 · @mroizofpv
Modalità di volo: Acro vs Stabilizzato
Esistono sostanzialmente due modalità di volo di un quadricottero. La modalità stabilizzata, anche conosciuta come self-level, e la modalità ACRO, anche conosciuta come modalità rates. La modalità stabilizzata è molto più limitata e tutti i piloti di droni racing pilotano in ACRO, anche perchè pilotare un quad racing in modalità stabilizzata non ha molto senso, se non in situazioni particolari di spazi particolarmente stretti per riprese cinematic.
30 dicembre 2020 · @mroizofpv
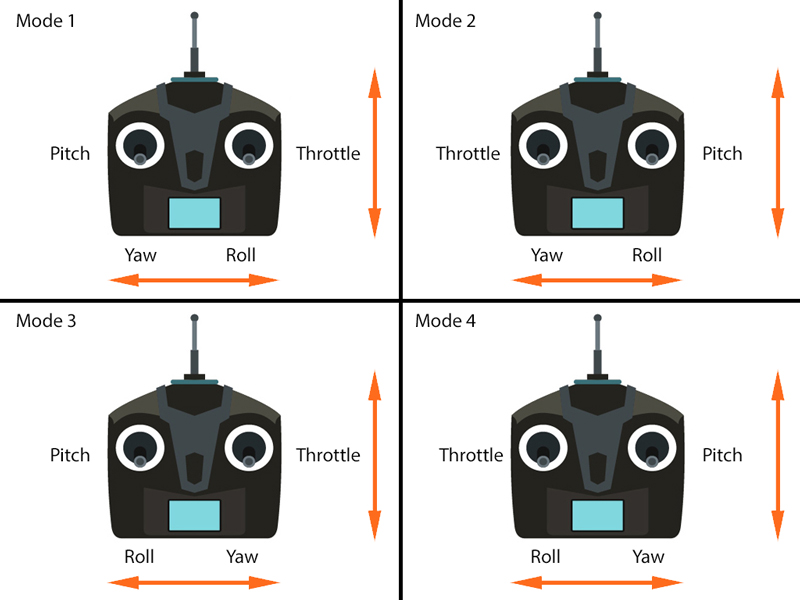
I comandi principali della radio: Pitch, Roll, Yaw e Throttle
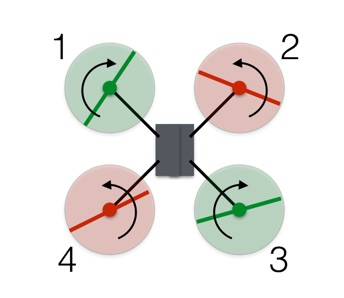
Un quadricottero si muove liberamente nello spazio aereo spostandosi, banalmente, in ascesa o discesa, a destra o a sinistra, in avanti o indietro. Per poter compiere questi movimenti, il quadricottero ruota su 3 assi nominati Pitch (il beccheggio), Roll (il rollio), Yaw (l’imbardata) combinati con la velocità della rotazione delle eliche, che è regolata dal Throttle (detto anche semplicemente gas).
08 dicembre 2020 · @sevvefpv
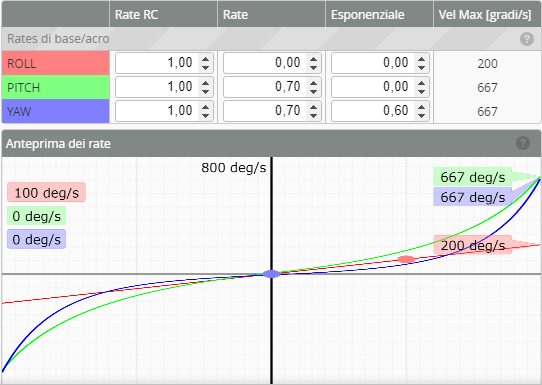
Cosa sono e come funzionano i Rates in Betaflight
Questa guida ha lo scopo di informarti e guidarti su tutto quello che c’è da sapere a proposito dei rates: cosa sono, come configurarli e come trovare la combinazione giusta per volare al meglio qualsiasi sia il tuo stile o la tua tipologia di drone.