01 gennaio 2021 · @mroizofpv
Come fa un drone a volare?
PrincipianteTutorial per volareHardwareFirmwareAbbiamo visto nella nostra guida Come è fatto un drone racing? le componenti essenziali che permettono la magia del volo. Ma quali sono le leggi fisiche che il quadricottero sfrutta per decollare, muoversi in tutte le direzioni, roteare su se stesso? Come fa un drone a volare?
La nostra risposta non sarà propriamente un trattato di fisica, ma cercheremo di capire comunque per quali leggi dell’aereodinamica il quadricottero riesce a librarsi nell’aria.
Spinta Verticale
Per volare, è necessario un sistema che sia in grado di generare una forza opposta alla forza di gravità, e generare una spinta dal basso verso l’alto superiore al peso al decollo del quadricottero. Una forza costante che nel caso dei quadricotteri è data dalla rotazione di quattro eliche. Ogni elica è azionata da un motore che a sua volta è controllato da un microprocessore (Electronic Speed Controller) che ne determina la velocità di rotazione in maniera indipendente.
Ogni elica ed ogni motore cioè possono roteare ad una velocità differente ed indipendente dagli altri tre.
La forza generata da un’elica si chiama spinta.
Nel quadricottero quindi la spinta è data dalla rotazione delle eliche e quindi, rispetto ad un aereo, il veivolo non ha bisogno di essere in movimento per ottenere la spinta necessaria per rimanere in volo.
Rotazione delle eliche ed Hovering
Per capire in che modo il quadricottero riesce a virare e librarsi nell’aria compiendo ogni tipo di evoluzione, dobbiamo partire dal suo assetto neutrale, ovvero dall‘Hovering. L’Hovering è quello stato di assetto a quota costante e velocità zero del drone in aria.
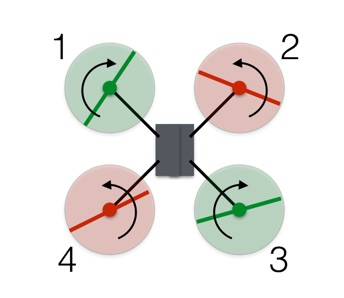
Questo avviene grazie alla spinta contrapposta generata dalle due coppie di eliche (e di motori) che come si vede in questo schema, roteano in senso opposto. Due eliche e due motori roteano in senso orario (1-3) e due in senso antiorario (2-4).
Nello stadio di Hovering, semplicemente alzando la levetta del Throttle, i quattro motori incrementano il numero di giri in maniera uniforme, facendo roteare tutte le eliche alla stessa velocità. La spinta contrapposta generata dalle eliche 1-3 e 2-4 fa si che il quadricottero prenda quota e resti fermo.
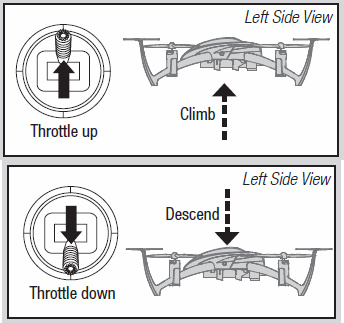
- Quando la Spinta generata dalle eliche è superiore o inferiore alla forza di gravità il drone sale o scende.
- Quando la Spinta è uguale alla forza di gravità, il drone resta stazionario in volo.
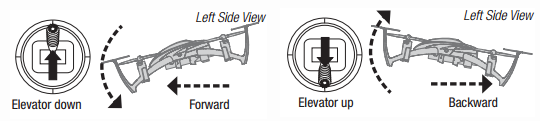
Il Volo traslato
In questo esempio le eliche davanti (1-2) roteano meno velocemente di quelle posteriori (4-3). La spinta delle eliche posteriori è maggiore e il quadricottero si inclina in avanti e si muove in quella direzione.
Per volo traslato intendiamo il movimento in avanti ed indietro (PITCH) e il movimento a destra e a sinistra (ROLL)
Per passare dallo stadio di hovering al volo traslato, il quadricottero aumenta o diminuisce la velocità di rotazione di una coppia di eliche adiacenti. Rallentando o aumentando la velocità di una coppia di eliche adiacenti, la spinta totale su quell’asse sarà minore o maggiore rispetto a quella dell’asse opposto e di conseguenza il drone si inclina, esattamente come avviene togliendo peso su uno dei due piani della bilancia.
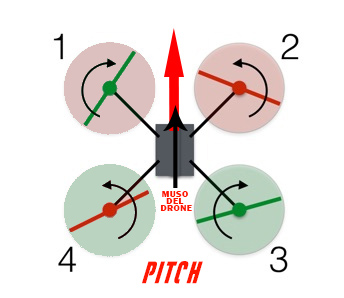
In questo esempio la velocità di rotazione delle eliche anteriori (1-2) è minore di quelle posteriori (3-4), il quadricottero si inclina in avanti e si muove in quella direzione.
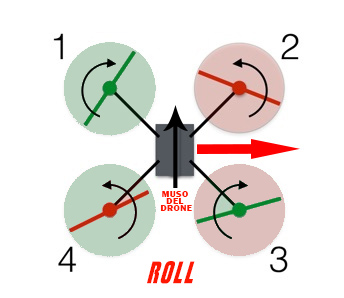
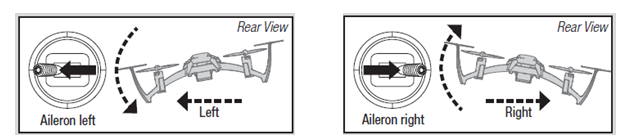
In questo esempio la velocità di rotazione delle eliche di destra (2-3) è minore di quelle di sinistra (1-4), il quadricottero si inclina verso destra e si muove in quella direzione.
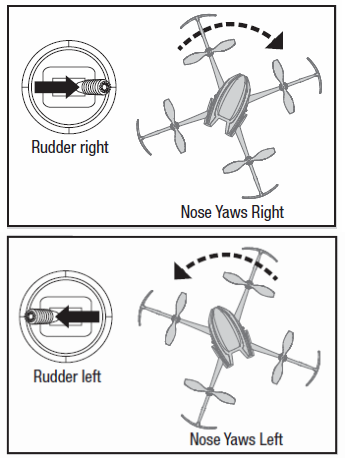
L’imbardata o YAW
Aumentando i giri dei due motori che ruotano in senso orario e diminuendo i giri degli altri due motori il quadricottero effettuerà quella che viene chiamata imbardata (YAW) a sinistra ovvero inizierà a ruotare su se stesso in senso antiorario e viceversa.
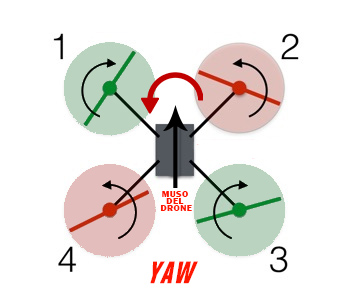
Rallentando le due eliche in rotazione anti oraria (2-4) si avrà una diminuzione della coppia di reazione antioraria; di conseguenza la coppia di reazione in senso orario fornita dalle altre due eliche che ruotano in senso orario (1-3) sarà maggiore, e il drone inizierà un’imbardata in senso antiorario.
Conclusione
La riduzione o l’aumento della velocità della rotazione dei motori e di conseguenza delle eliche è regolata dal Flight Controller che in frazioni di millisecondi, riceve gli impulsi trasmessi dal radiocomando tramite la ricevente radio, interpreta i dati del gyroscopio (e dell’accelerometro nella modalità stabilizzata) e comunica agli ESC (Elettronic Speed Controller) come regolare la velocità dei quattro motori.
Questa straordinaria tecnologia elettronica permette quella che a molti sembra una magia, ma che in realtà è frutto dell’ingegno umano. Speriamo che dopo questa lettura vi sia molto più chiaro come fa un drone a volare.
Fonti
Mr.OIZO FPV
Ho iniziato per curiosità, ho scoperto quello che è molto più di un hobby, una vera e propria passione. FPV is freedom.