Prima o poi, il tuo collegamento tra radio e drone fallirà. Nessun sistema di controllo radio è perfetto. Cosa succede quando quel collegamento si interrompe? Faresti meglio a conoscere la risposta prima di decollare, invece di scoprirla nel bel mezzo di un lungo volo, magari in un posto lontano e difficile da raggiungere.
Cos'è il Failsafe?
Il failsafe è il comportamento "ultima risorsa" quando la tuo modello non riceve più segnali di controllo da parte della radio. I piloti a volte parlano di "avere un failsafe", il che significa semplicemente che il collegamento di controllo ha smesso di funzionare. la ricevente radio sarà il primo componente a notare se hai perso il controllo e potrà regolare il suo comportamento e avvisare il flight controller. È anche possibile forzare manualmente un drone in modalità failsafe utilizzando un interruttore sulla radio, in modo che FAILSAFE possa fare riferimento ad una mode sul flight controller.
Perché abbiamo bisogno del failsafe?
Failsafe impedisce al tuo quad di agire pericolosamente se perdi il controllo. Impedisce anche quello che viene chiamato un "runaway", in cui modello che non comunica con la radio continua a viaggiare indefinitamente. Infine, il failsafe può gestire i problemi di qualità del collegamento di controllo a breve termine.
Se il tuo drone ha sensori GPS e barometro, a volte il failsafe può riportarlo automaticamente al punto di partenza e farlo atterrare dolcemente, proteggendo ulteriormente la tua attrezzatura. Per i droni da corsa e freestyle, non lo consigliamo. I nostri droni semplicemente non sono costruiti per questo livello di automazione. Tentare questo senza sensori di prossimità e ambiente aggiuntivi può avere risultati imprevisti e pericolosi.
Ma se vuoi saperne di più su come impostare il GPS per il return to home, abbiamo scritto questa guida.
Come funziona?
Quando il controllo viene perso per la prima volta, la ricevente è il primo componente a saperlo e utilizza le proprie impostazioni di sicurezza. Il ricevitore, quindi decide su cosa impostare ciascun canale di controllo in assenza di un segnale e può trasmettere un flag "failsafe" a un controllore di volo connesso. Se il tuo controllore di volo vede che c'è un problema con il segnale di controllo, attiverà la sua modalità di sicurezza. Per essere più precisi, Betaflight entra in modalità failsafe quando un interruttore attiva la modalità FAILSAFE, quando una ricevente invia un flag "failsafe" o quando qualsiasi segnale del canale di controllo è al di fuori dell'intervallo consentito. Un canale di controllo è acceleratore, beccheggio, rollio o imbardata. Se un canale AUX esce dal range, utilizza l'impostazione di fallback individuale di quel canale senza attivare il failsafe per tutto il resto.
Il flight controller di solito è più intelligente di una ricevente su come gestisce un failsafe, quindi di solito è preferibile lasciare che faccia la maggior parte del lavoro.
Configurazione di Failsafe in Betaflight
Come per tutti i lavori al banco, rimuovi le eliche prima di apportare modifiche alla configurazione. Avvia Betaflight e vai alla scheda "Failsafe". La scheda "Failsafe" viene visualizzata solo se si abilita la "Modalità esperto" in alto a destra nelle impostazioni.
Intervallo valido

Ogni canale RC funzionante standard fornisce un valore compreso tra 1000 e 2000. Questi limiti possono essere regolati dal trasmettitore per darti una maggiore gamma di controllo, ma non lo consigliamo per i piloti miniquad. Nella sezione "Valid Pulse Range Settings", puoi decidere quanto lontano dal raggio deve arrivare il segnale prima che Betaflight entri in modalità Failsafe. Le impostazioni predefinite di 885 e 2115 raramente devono essere modificate a meno che non siano state apportate modifiche a "EPA" o agli end point sul trasmettitore. Lasciali stare a meno che tu non abbia una necessità speciale con il trasmettitore e il ricevitore.
Fase 1
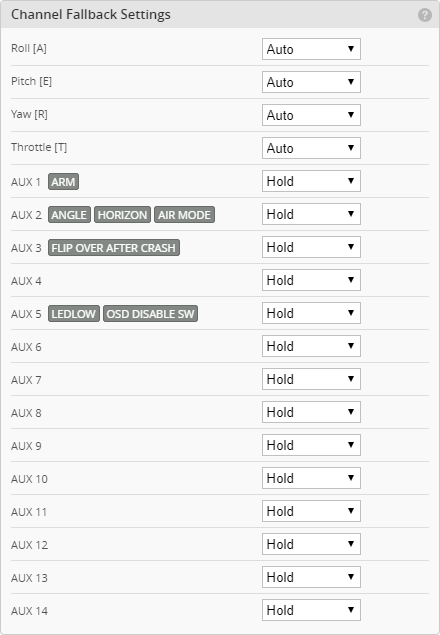
Quando Betaflight entra in Failsafe Mode, inizia nella "Fase 1". All'interno del pannello Fase 1, imposta ciò che desideri che ogni canale faccia immediatamente quando il segnale viene perso. Le opzioni per i canali di controllo (acceleratore, beccheggio, rollio e imbardata) sono "Hold" e "Auto". Le opzioni per i canali AUX sono "Hold" e "Set".
- Hold significa che questo canale continuerà come se gli interruttori e le levette della radio non fossero cambiati
Auto significa cose diverse per canali diversi:
- L'acceleratore andrà al valore più basso (spento)
- Roll, Pitch e Yaw andranno al centro
- Set consente di scegliere un valore specifico che verrà utilizzato: quando viene selezionato, viene visualizzata un'area di immissione per il canale
La fase 1 è attiva solo per un breve periodo. Questa volta è configurabile nel pannello Fase 2 e il valore predefinito di quattro decimi di secondo è un buon valore.
Perché impostare un comportamento che duri solo una frazione di secondo?
La fase 1 è particolarmente utile per rilevare le interruzioni temporanee del segnale di controllo. Se qualcosa si frappone tra te e il tuo modello, o c'è qualche breve interferenza, la Fase 1 ti offre un buffer in cui è facile riprendere il controllo durante il volo. Se il segnale radio torna durante la fase 1, riprenderai da dove eri rimasto e potrai continuare a volare. (Se ciò accade, prendere in considerazione l'atterraggio in sicurezza subito per indagare sulla causa della perdita del segnale.)
La fase 1 del failsafe offre l'opportunità di recuperare da problemi di connessione momentanei.
Se normalmente voli in modalità acro, roll, pitch e yaw sono i più sicuri se impostati su "Auto". Se stai ruotando quando entra in funzione il failsafe, "Auto" interromperà la rotazione. Con "Hold", il tuo quad continuerà a girare e potrebbe facilmente capovolgersi.
Per quanto riguarda l'acceleratore, c'è un dibattito su quale metodo sia più sicuro:
- Auto fermerà le eliche non appena il segnale è andato, il che causa il minor danno a qualunque cosa il quad si schianti.
- Hold manterrà la stessa velocità del quad, il che ti consente di recuperare più facilmente se il segnale ritorna.
Noi di NorthFPV, pensiamo che vada bene impostare la fase 1 di failsafe su "Hold" sull'acceleratore, purché si mantenga il tempo di guardia per la fase 1 a un valore basso. Probabilmente una frazione di secondo non farà una grande differenza nella quantità di danni causati in un incidente, ma un recupero più rapido potrebbe impedire del tutto il verificarsi di un incidente. A noi sembra la situazione più sicura.
Per i canali AUX, "Hold" è spesso appropriato. Ciascuna modalità configurata appare come una label dal canale per aiutarti a configurarli. Ricorda che se un canale di controllo esce dal range, si applicano tutti questi fallback, ma se solo i canali AUX escono dal range, l'unico fallback utilizzato è per il canale AUX specifico che non funziona. Senza un canale di controllo difettoso, lo stadio 1 non diventa completamente attivo.
Fase 2
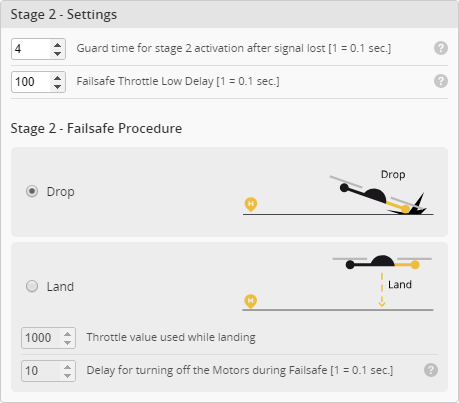
La fase 2 si attiva quando il timer della fase 1 è scaduto. Puoi impostare questo timer nelle impostazioni della "Fase 2", come "Tempo di guardia". Questo numero è in decimi di secondo. Le versioni precedenti di Betaflight avevano la possibilità di abilitare o disabilitare la Fase 2. Se stai usando una versione precedente di Betaflight e vedi questa opzione, assicurati che la "Fase 2" sia abilitata! Senza di questa, la fase 1 continua a tempo indeterminato. Non ci sono buoni motivi per disabilitare la fase 2, quindi le versioni più recenti non hanno più l'opzione.
Il Failsafe Throttle Low Delay consente al quad di disarmarsi semplicemente invece di seguire la procedura completa di failsafe quando il segnale è andato. Se l'acceleratore è stato disattivato per questo periodo di tempo quando entra in funzione il failsafe, si disattiverà semplicemente normalmente. Il tempo predefinito qui è appropriato per la maggior parte dei piloti.
Le opzioni per la procedura principali della Fase 2 sono "Drop" o "Land".
- Drop si disarma immediatamente, spegnendo tutti i motori e quindi uscendo dalla Fase 2
- Land imposta i motori su un valore di accelerazione basso e utilizza l'accelerometro per mantenere il livello del velivolo
Quando si parla di Stage 2, la scelta per quasi tutti i piloti è chiara: "Drop". L'idea alla base di "Land" è che il quad si livella e poi si abbassa delicatamente a terra. Il software fa molte ipotesi sul quad e il suo ambiente, ed è facile immaginare situazioni in cui queste ipotesi non sono tutte vere. Betaflight non sa quando il quad tocca effettivamente terra o se il terreno è a livello: le eliche continueranno a girare dopo l'atterraggio, tagliando e scontrandosi ripetutamente qualsiasi cosa nelle vicinanze. "Low throttle" è solo un valore numerico, quindi la quantità effettiva di spinta prodotta può cambiare con l'uscita della batteria. Se la tuo modello è vicino a persone quando il segnale viene perso, il valore dell'acceleratore non è adeguato o l'accelerometro ha perso la calibrazione, "Land" può peggiorare ulteriormente una situazione pericolosa. È meglio fermare il movimento delle eliche.
Consigliamo vivamente a tutti di impostare la Fase 2 su "Drop".
Se devi impostare la Fase 2 su "Land", le eliche continueranno a girare per tutto il tempo in cui l'imbarcazione rimane nella Fase 2. Anche la Fase 2 ha un "tempo attivo", se configurato su "Land". Trascorso questo tempo, si disarmerà e uscirà dalla Fase 2. Prestare estrema attenzione nell'impostare il valore di "accelerazione in atterraggio". Se commetti un errore durante il test di questo valore, puoi far volare via il tuo quad. Prendi in considerazione l'utilizzo di un interruttore di sicurezza su un interruttore durante il test e provare solo quando il drone ben lontano da qualsiasi cosa soprattutto persone.
Usa una batteria nuova del voltaggio più alto che usi sul drone, in modo che sotto il failsafe il valore dell'acceleratore non produca più spinta di quanto ti aspetti.
Il disarmamento automatico all'interno della Fase 2 attiva anche un controllo di sicurezza interno in cui il collegamento di controllo deve rimanere stabilito per 30 secondi prima di poter essere riattivato. Se usi un kill switch, il ritardo di riarmo è di soli 3 secondi. Se non sei mai decollato all'inizio, questo ritardo non viene attivato.
Nella fase 2, i canali AUX continuano a utilizzare le impostazioni di fallback della fase 1.
Recupero
Riprenderete immediatamente il controllo del velivolo se il collegamento viene ristabilito durante la fase 1 o 2. È molto importante ricordare che il controllore di volo sarà ancora armato fino all'uscita dalla fase 2. È pericoloso impostare un "tempo di attività" lungo per la fase 2 in modalità "Land". Ad esempio, se il tuo quad va giù dopo un fail safe, rimarrà lì, armato, fino allo scadere del timer della fase 2. Recuperando il collegamento di controllo, esso tornerà immediatamente al valore di accelerazione e alla direzione di controllo che la radio sta trasmettendo. Ciò avverrà senza preavviso! Evita ciò mantenendo il timer della Fase 2 il più breve possibile (o usa semplicemente "Drop").
Interruttore failsafe

Puoi anche entrare in Failsafe tramite un interruttore sulla radio dalla scheda Mode. Se lo imposti, scegli in Betaflight se questo ti metterà in Fase 1, Fase 2 o semplicemente disarmare immediatamente il quad. Questa funzionalita è utile soprattutto quando si per testare il tuo drone.

Configurazione di Failsafe sul ricevitore
Tutte le riceventi hanno un comportamento di sicurezza e la maggior parte ti consente di configurarlo in qualche modo. Il sistema di sicurezza del ricevitore è necessario se non si utilizza affatto un controller di volo, come con le ali e altri tipi di aeromodelli. Questo non è un caso in cui l'installazione di cose in più di un luogo fornisce sempre sicurezza attraverso la ridondanza. Quando si imposta il failsafe sul ricevitore, è possibile impedire al controllore di volo di notare che il collegamento di controllo è morto in modo che non passi mai alla modalità failsafe. Assicurati di eseguire un test di sicurezza ogni volta che imposti un nuovo quad o ricolleghi il ricevitore.
In genere, se stai utilizzando un protocollo seriale sul tuo ricevitore come SBUS, Betaflight verrà informato ogni volta che il ricevitore entra in modalità di sicurezza, indipendentemente dalle impostazioni che utilizzi. Questo è davvero utile, ma è meglio non fare affidamento su di esso. Dovresti andare avanti e seguire le istruzioni seguenti per la tua radio / ricevitore, nel caso in cui questo flag di sicurezza seriale fallisca per qualsiasi motivo.
FrSky
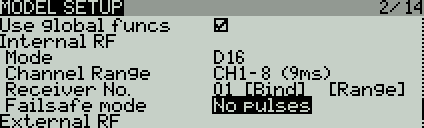
Le riceventi FrSky recenti ricevono le impostazioni di sicurezza passate dalla radio. Accedi al menu per il tuo modello. Nella pagina Model Setup, scendi fino a "Failsafe" o "Failsafe mode". Qui puoi scegliere cosa fare quando la connessione viene persa:
- No pulses imposta effettivamente tutti i canali su zero
- Receiver passa il controllo del comportamento Failsafe a tutto ciò che è configurato sul ricevitore stesso
- Custom ti consente di impostare il valore di ogni canale
- Hold mantiene in posizione indefinitamente l'ultimo valore ricevuto per tutti i canali
- Not Set imposta anche tutti i canali a zero, ma avvisa l'utente che non ha selezionato consapevolmente un comportamento di sicurezza
Affinché Betaflight subentri, imposta la modalità di sicurezza su "No pulses". Altre opzioni possono impedire a Betaflight di vedere un valore del segnale fuori portata, impedendo il passaggio alla modalità di sicurezza.
La maggior parte dei ricevitori FrSky ha un pulsante sul ricevitore stesso per impostare la sicurezza. Controlla il manuale della tua ricevente specifica, ma questo di solito scommette impostato su "No pulses" ogni volta che effettui il binding e utilizzerà la levetta corrente e le posizioni degli interruttori sulla radio se la attivi. Ancora una volta, per mantenere il controllo di Betaflight, mantieni l'impostazione predefinita "No pulses".
Ultima spiaggia
Se il tuo ricevitore non può essere configurato per inviare segnali fuori portata ma hai un canale libero, puoi utilizzare le "modalità" di Betaflight per forzarlo nella condizione di sicurezza. Inizia aprendo Betaflight e passando alla scheda "Ricevitore". Accendi sia la radio che la ricevente e assicurati di stabilire una connessione, quindi spegni la radio. Trova un canale AUX di riserva che puoi usare per questo scopo e prendi nota della sua posizione.
Passa quindi alla scheda "Mode" e trova la modalità FAILSAFE. Abilitalo e impostalo sul canale AUX che hai scelto, con lo slider impostato in modo che sia attivo ora, quando la tua radio è spenta. A questo punto il tuo quad non sarà in grado di volare poiché è sempre in modalità FAILSAFE.
Riaccendi la radio e ristabilirà la connessione. Attraverso le impostazioni della tua radio, trova il canale AUX che stavi utilizzando e cambia il valore in modo che sia qualcosa di molto diverso da quello che hai visto prima di accenderlo. Ad esempio, se il valore "off" è 1000, l'impostazione del canale su "100%" dovrebbe darti un valore in Betaflight vicino a 2000. Infine, assicurati che l'intervallo della modalità FAILSAFE copra la posizione quando la radio è "spenta" ma non non coprire quando è "acceso". Accendi e spegni la radio per essere sicuro.
Infine, nella scheda "Failsafe", imposta l'interruttore Failsafe su "Fase 1".
Ciò ti consentirà di utilizzare le impostazioni di sicurezza di Betaflight come faresti normalmente.
Conclusioni
Quando imposti il failsafe, valuta la possibilità di attivare l'opzione buzzer per RX_LOST nella scheda "Confiruration". Se hai installato un beeper, questo ti aiuterà a trovare il tuo quad molto più facilmente. Se non hai un beeper ma utilizzi DSHOT, imposta invece il beacon ESC. Nella recente Betaflight, anche questo è facilmente eseguibile direttamente dalla scheda "Configurazione".
iamlucafpv
Mi chiamo Luca e sono un appassionato di droni FPV. Questa passione mi ha portato anche a creare la prima community italiana di FPV chiamata NorthFPV, con lo scopo di aiutare chi vuole entrare in questo mondo.