Ecco dunque come è fatto un drone racing e tutto quello che ti servirà per iniziare.
Il Frame?
Il FRAME è il telaio del drone, sul quale vengono montati tutti componenti. E’ quindi il primo componente fondamentale per costruire un drone. Il Frame serve anche a proteggere tutta l’elettronica del tuo drone racing. Deve essere quindi robusto e resistente, ma anche leggero. Perchè la leggerezza del tuo quadricottero è importante per avere una maggiore durata del tempo di volo (autonomia) e agilità.
Un telaio può essere quindi realizzato con qualsiasi materiale, dal legno alla fibra di carbonio, alla plastica alla stampa in 3D.
Principalmente si utilizzano frame in fibra di carbonio perchè è un materiale leggero, resistente e flessibile.
Il frame aiuta a determinare la categoria o classe a cui appartiene il Drone, misurando l’interasse, ovvero la distanza diagonale da un motore all’altro, espressa generalmente in millimetri.
Le forme dei Frame possono essere molte. Le più comuni sono il classico X Frame (X puro o X strached) ,il Frame H, e il Frame quadrato.
Come è fatto un Drone Racing? Come è fatto un Drone Racing? Come è fatto un Drone Racing? Come è fatto un Drone Racing? Come è fatto un Drone Racing?



I Motori

I motori, generalmente divisi in brushless e brushed, servono ovviamente per permettere la rotazione delle eliche che fa volare il nostro drone. Sono collegati agli ESC, dei circuiti elettronici a loro volta collegati al Flight Controller, che ne regolano la velocità di rotazione. Per approfondimenti vi rimandiamo ala sezione GUIDE del nostro sito Come fa un drone a volare?.
E’ importante sapere per ora che ne esistono di diversi tipi, divisi per potenza e dimensioni. Generalmente nella scelta dei motori troverete tanti numeri… cosa indicano i numeri dei motori dei droni racing?
Ad esempio 1408 4000 kv —> i primi due numeri indicano la larghezza dello statore ovvero 14cm. I secondi due 08cm l’altezza dello statore. 4000kv sono invece i giri che il motore compie se alimentato ad 1 Volt in assenza di carico e determinano quindi la potenza.
PBD Power Distribution Board
PDB sta per scheda di distribuzione dell’alimentaziome. Qui viene collegato il cavo di alimentazione della batteria (es. XT60). Come suggerisce il nome, il PDB distribuisce l’energia alle componenti alle tensioni richieste. Ultimamente vengono prodotti elementi come Flight Controller o ESC detti All-In-One che includono la funzione della PBD al loro interno. Ad esempio gli ESC 4on1 che sulla stessa scheda trovano gli esc e il sistema di distribuzione dell’alimentazione.
ESC (ELECTRONIC SPEED CONTROLLER)

Sono microcircuiti indispensabili in quanto sono quelli che forniscono e controllano il voltaggio erogato ai motori. Ogni ESC controlla un motore in maniera indipendente dagli altri. Questo permette al Drone non solo di alzarsi in volo, ma anche di muoversi liberamente nell’aria. Tuttavia, se si utilizzano motori spazzolati (brushed), non saranno necessari ESC perché hanno solo bisogno di un semplice ingresso di alimentazione CC. I motori brushless necessitano di un input di 3 volt fuori fase. Sembra spaventoso, ma una volta collegato l’ESC genererà automaticamente la tensione trifase fuori fase con conseguente rotazione. In sostanza, un ESC ha tre uscite che verranno saldate ai connettori femmina sul motore da un lato e sulla PBD dall’altro. Negli ultimi anni spesso si tende a non utilizzare più gli esc singoli, ma delle PBD che hanno inclusi tutti e 4 gli ESC sulla piastra stessa, detti anche ESC 4in1
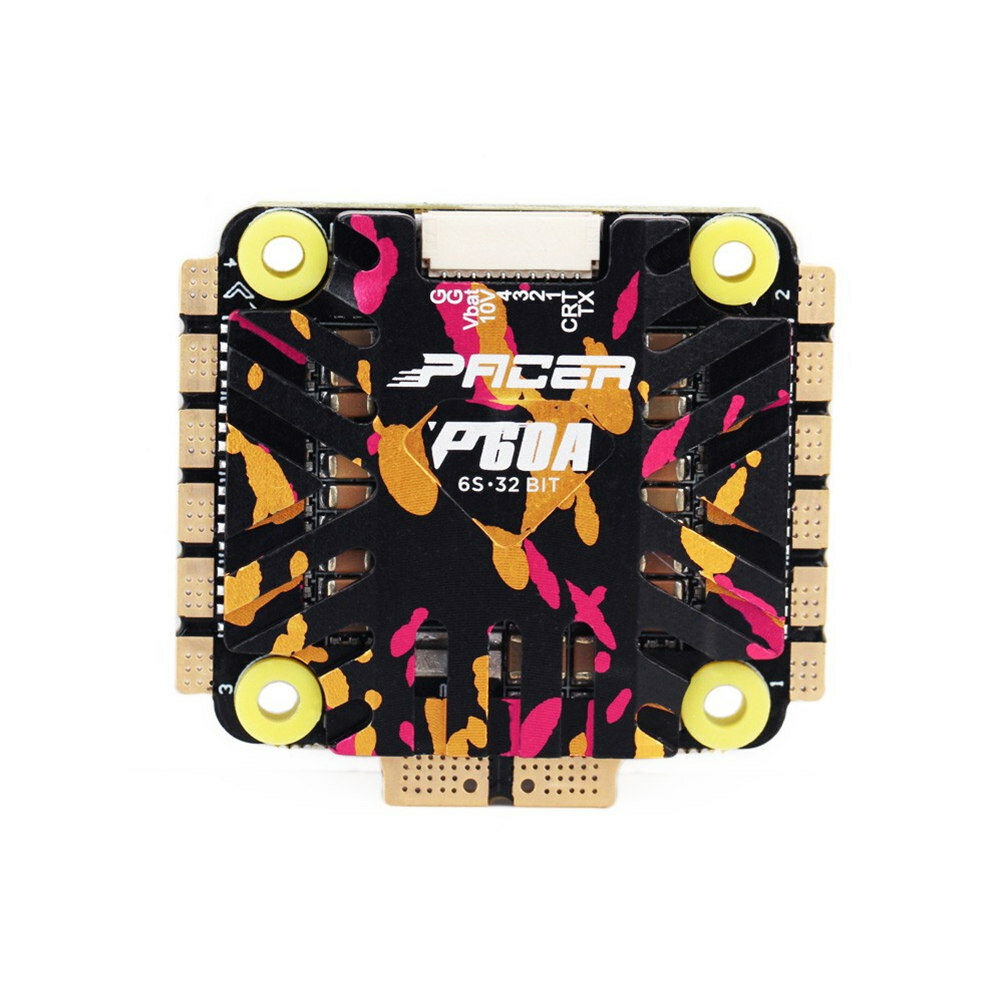
Esempio di PBD + ESC 4in1
Flight Controller
Questo è il cervello del quadricottero a pilotaggio remoto.

Il Flight Controller è un po come la scheda madre di un PC, a cui saranno collegati tutti gli altri componenti, ad esempio il sistema GPS, la ricevente radio, la VTX etc... Un buon controller di volo dovrebbe essere dotato di un accelerometro e un giroscopio che forniscono al Fligh Controller i dati per interpretare correttamente la rotazione drone in volo.
Sui Flight Controller (FC) deve essere installato un firmware. Esistono fondamentalmente due tipi di firmware: quello chiuso (non modificabile dall’utente) e quello aperto (puoi vedere i codici e apportare alcune modifiche adatte a te). I firmware “aperti” maggiormente diffusi al momento sono BetaFlight, Iflight ed Emuflight
Esistono vari tipi di flight controller, anche se ormai dal 2018 in poi si montano soltanto quelli di ultima generazione ovvero con processori F4 o F7. Un’altra caratteristica importante per la scelta del Flight Controller è il numero di porte di comunicazione in ingresso ed uscita, dette UART. Ogni UART è composta da un canale in entrata (RX) e un canale di trasmissione (TX) per comunicare con tutte le periferiche esterne, come GPS, Riceventi radio, beepers. Sui flight controllers è sempre presente un’entrata video per ricevere il segnale della telecamera fpv ed un’uscita video per trasmettere il segnale della telecamera, con l’aggiunta dell’OSD, alla VTX.
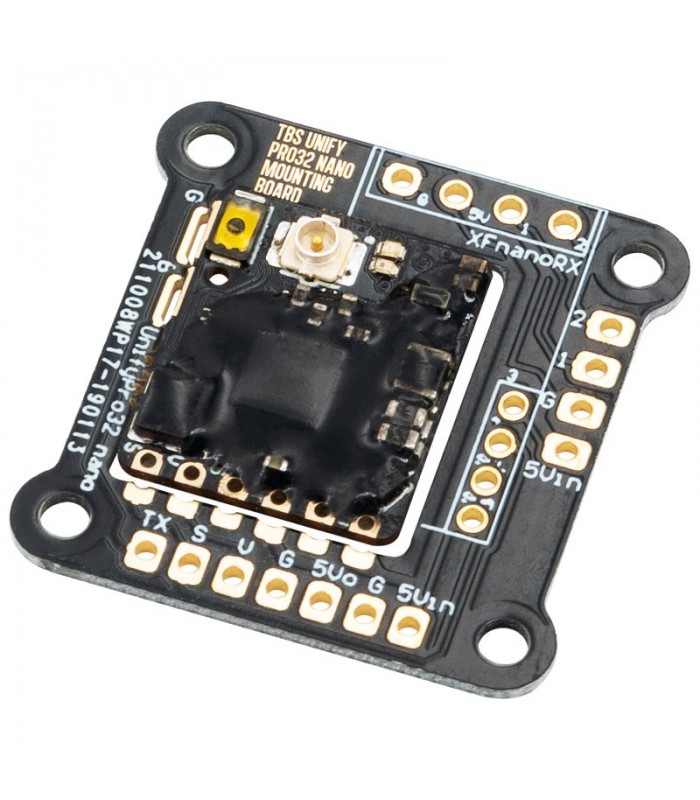
Ricevente e Trasmittente RX

La ricevente è un circuito con un’antenna che viene montato sul quadricottero, collegato poi al Flight Controller, per ricevere i comandi radio inviati dalla trasmittente (TX) che si trova invece all’interno o montata come modulo esterno, sul radiocomando. Grazie a questa periferica quindi il drone diventa pilotabile in remoto, poichè i comandi radio eseguiti dall’operatore vengono ricevuti dalla ricevente, inviati al Flight Controller che a sua volta invia impulsi agli ESC che regolano la potenza dei motori. E tutto questo avviene in millesimi di secondo.
Esistono diversi tipi di sistemi riceventi trasmittenti. La potenza del segnale radio è misurata in mW, milliwatts, generalmente dai 10mW fino ai 1000mW (1 Watt). Teoricamente più è alto questo valore maggiore sarà la copertura del segnale radio e quindi più lontano potremo volare con il nostro drone, anche se in realtà poi entrano in gioco diversi altri fattori, quali il contatto visivo diretto tra le antenne, eventuali interferenze di frequenza etc etc. Le frequenze utilizzate per il segnale radio sono due, 2.4Ghz e 5.8Ghz.
Video Trasmittente (VTX) E Antenne VTX

Il trasmettitore video, o VTX, si collega alla telecamera FPV per trasmettere il feed video del drone agli occhiali FPV o a ad un monitor. La maggior parte dei quadricotteri oggigiorno utilizzano la banda a 5,8 GHz per la trasmissione video.
Esistono due diversi tipi di sistemi, non compatibili tra loro. Il sistema Analogico, quello classico e utilizzato dalla nascita della disciplina, e quello Digitale, introdotto da DJI nel 2019. Non entreremo ora ad approfondire le differenze tra i due sistemi.
La VTX riceve un segnale video dalla telecamera FPV e lo ritrasmette agli occhiali. Alcune VTX funzionano a 5v altre più potenti, richiedono più voltaggio, fino ai 9v delle Air Unit digitali di DJI.
Anche la potenza del segnale della VTX è misurata in mW (milliwatts) e generalmente va dai 10mW alle più potenti che arrivano fino a 1000mW
Videocamere FPV

Una telecamera FPV consente al pilota di vedere la vista in prima persona (FPV) del quadricottero a bordo. Anche qui ormai esistono di due tipi, quelle per l’analogico e quelle per il sistema digitale.
Le telecamere FPV anaologiche non hanno una qualità video eccezionale, sono progettate per WDR (Wide Dynamic Range), ovvero adattarsi velocemente alle varie condizioni di luce, sfruttando la bassa latenza del segnale analogico che arriva al pilota praticamente in tempo reale (con latenze che arrivano anche a meno di 25 ms). La bassa latenza è estremamente importante per il pilotaggio in FPV, poichè un ritardo del segnale video potrebbe causare la perdita del controllo del drone da parte del pilota.
La latenza è quindi la quantità di tempo che intercorre tra la tua fotocamera FPV per catturare l’immagine e la visualizzazione di quell’immagine sullo schermo o negli occhiali. La telecamera FPV si collegherà al VTX (trasmettitore video), spesso tramite il Flight Controller che quindi sovrappone le informazioni dell’OSD (On-Screen Display) sull’immagine. Di solito una telecamera richiede 5 V per funzionare.
Nota: le telecamere trasmettono immagini con rapporti di dimensioni diverse (es. 16: 9 e 4: 3), controllare e assicurarsi che il display FPV (occhiali o schermo) sia compatibile. Diversi formati di segnale vengono utilizzati anche nella trasmissione delle immagini, (ad esempio PAL e NTSC) il display FPV deve anche essere in grado di decodificare il tipo di segnale rilevante. Al giorno d’oggi le telecamere sono spesso in grado di alternare tra questi formati di segnale e alcuni sono persino in grado di passare anche da un rapporto di visualizzazione dell’immagine all’altro.
Visori e monitor FPV


Il pilotaggio di un quadricottero e in generale di qualsiasi mezzo radiocomandato in FPV avviene grazie ad una telecamera posizionata sul drone stesso che trasmette il segnale video attraverso la VTX. Il segnale video viene ricevuto dalle antenne posizionate sugli occhiali o sui monitor FPV.
Occhiali FPV generalmente si dividono in visori e compatti. I visori sono più ingombranti e un unico monitor mentre gli occhiali compatti sono più sottili ed hanno due schermi separati, uno per occhio. Davanti agli schermi sono posizionati delle lenti che ingrandiscono i piccoli monitor, o il monitor unico.
Ne esistono di diverse marche e le caratteristiche principali sono la risoluzione (da 640 X 400 fino a 1920×1080), il formato (4:3 o 16:9), il campo visivo (FOV) misurato in gradi.
Come per tutto il sistema di trasmissione video, anche per gli occhiali FPV oggi la scelta ricade anzitutto tra sistema di trasmissione analogico o digitale. E’ bene notare che su occhiali digitali DJI sarà possibile comunque montare un modulo di ricezione analogico esterno da collegare tramite canale di ingresso video, mentre il contrario non è possibile.
Glo occhiali FPV possono avere già un sistema “diversity” integrato ovvero in grado di ricevere il segnale da due antenne diverse, oppure necessitare di un modulo esterno a parte per la ricezione del segnale. Possono avere o non avere un registratore DVR integrato per registrare quello che viene visualizzato negli occhiali direttamente su scheda SD.
Batterie LiPo

Le batterie LiPo sono la fonte di alimentazione maggiormente utilizzata sui quadricotteri FPV. LiPo (LIthium POlymer Battery) vengono utilizzate poichè immagazzinano alta densità di energia e hanno un’elevata velocità di scarica, necessaria per distribuire l’alto amperaggio necessario e richiesto dall'elettronica dei nostri droni.
Le batterie LiPo sono classificate in base alla loro tensione nominale (3,7 V per cella), conteggio delle celle in serie (indicato come un numero seguito da “S”), ovvero 4S = 4 celle = 14,8 V. Sono suddivise per capacità in milliAmper/ora (ovvero mAh) e infine per la velocità di scarica o Classificazione C (es. 75C).
Esempio: 5000mah (capacità in milliamper/ora) 4s o 14,8v (numero di celle tensione totale) 100C (velocità di scarica).
Mr.OIZO FPV
Ho iniziato per curiosità, ho scoperto quello che è molto più di un hobby, una vera e propria passione. FPV is freedom.