05 dicembre 2020 · @nichoroberts
Come configurare un drone FPV su Betaflight
PrincipianteTutorial per volareFirmware![]()
In questa guida proverò a spiegarti passo per passo come configurare il firmware Betaflight per la tua prima volta è tutte quelle successive.
Hai problemi a confiugrare Betaflight? Unisciti al nostro gruppo Telegram e chiedi una mano ai membri di NorthFPV.
Inizieremo capendo come scaricare e installare il configuratore, poi passeremo ad un analisi di tutte le impostazioni indispensabile per preparare il tuo drone al primo volo.
Betaflight è un software open source completamente gratuito necessario per settare tutte le impostazioni del tuo controllore di volo (flight controller) è il più completo ed il più diffuso, infatti potrai trovare molte informazioni a riguardo.
Faremo un tour di tutte le sezioni del software per configurare il tuo quad e prepararlo al primo volo.
SCARICARE BETAFLIGHT
Esistono due modi per scaricare il software Betaflight, il primo è il più semplice è ti permetterà di usare betaflight come estensione di chrome. Il secondo modo è leggermente più complesso è ti permetterà di scaricare ed installare betaflight sul tuo pc come una normale applicazione stand-alone.
Primo modo: Non devi fare altro che cliccare su questo link
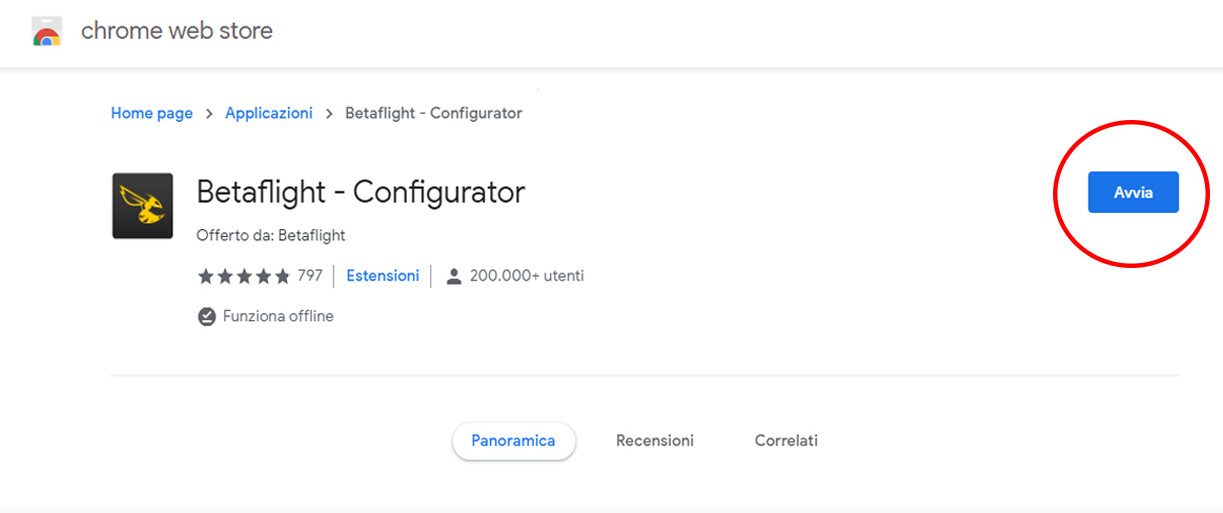 Una volta su questa pagina ti basterà cliccare su avvia è seguire la procedura di installazione.
Una volta su questa pagina ti basterà cliccare su avvia è seguire la procedura di installazione.
Secondo modo: Cliccando questo link giungerai alla pagina di github, dovrai scorrere in basso fino ai link di download come in foto:
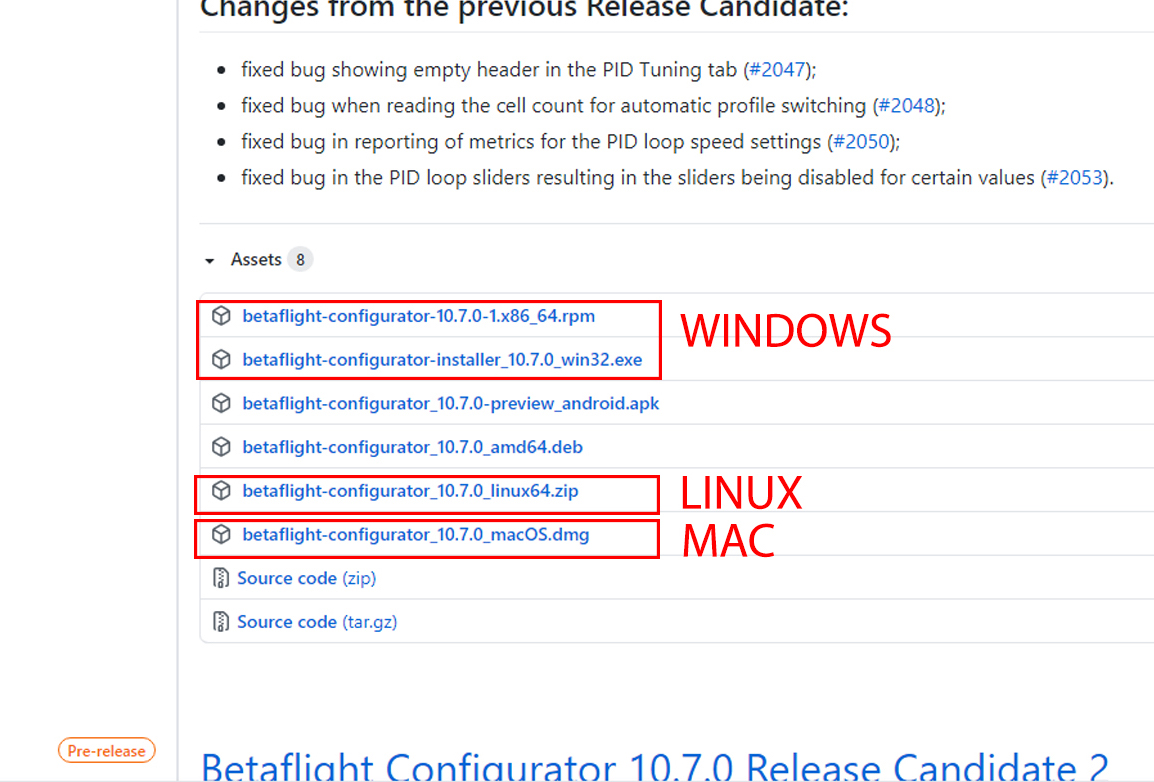
Non cliccare sui link che vedi più in basso perchè si tratta di versioni ancora instabili in fase di test! Una volta scaricato il file eseguibile (.exe) nel caso di windows, ti basterà seguire la normale procedura di installazione che segui per ogni sofware.
Finite le procedure noiose arriviamo di seguito alla parte interessante...
Aggiorna firmware
Quasi sicuramente il tuo Flight Controller (FC) sia nel caso di un drone preassemblato che nel caso tu abbia realizzato la tua build, ti sarà fornito con un firmware Betaflight preinstallato. Quindi non sarà strettamente necessario Flashare (aggiornare) il firmware del tuo FC a meno che tu non desideri avere installata su di esso l’ultima versione di Betaflight.
Configurazione di Betaflight per la prima volta
Questa guida è pensata per i principianti, quindi vedremo solo sulle configurazioni di base che ti saranno necessarie per volare. Se una volta fatta un po’ di esperienza vorrai approfondire qualche argomento troverai sul nostro sito tutti gli articoli in cui andremo ad analizzare ogni sezione del software.
Importante! Ogni volta che colleghi il tuo drone al pc assicurati che tutte le eliche siano state rimosse per evitare incidenti.
Collegamento del cavo micro USB
Per collegare il tuo drone al PC (o Mac) ti servirà un cavo dati micro USB o USB-C.
Una delle cause più banali per cui non riuscirai a controllare il tuo drone con il software sarà proprio quella di non avere utilizzato un cavo adatto alla trasmissione dati (ma solo per ricarica).
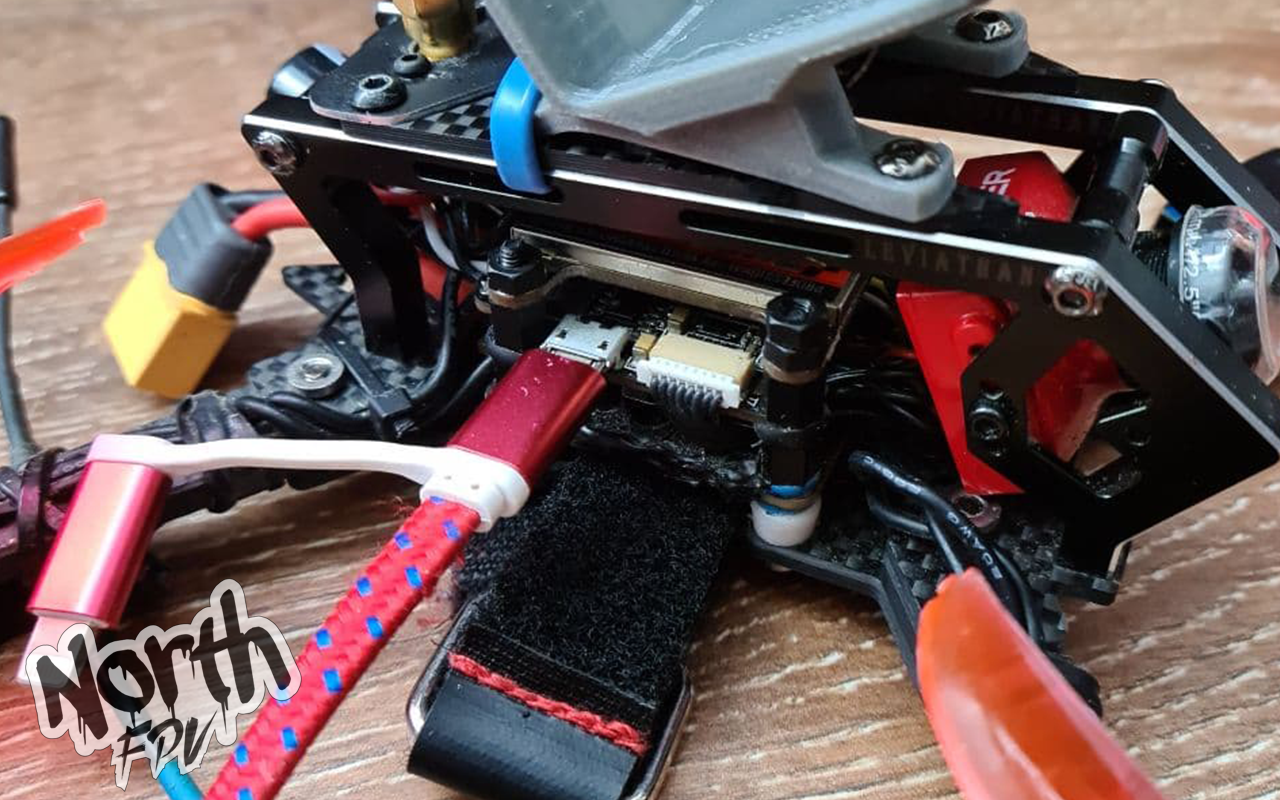
Il connettore micro USB va inserito nel flight controller, è poi al PC (non è importante in quale ordine).
Connessione
Una volta avviato Betaflight e dopo aver connesso il drone, in alto a destra (sulla schermata del software) dovrebbe apparire una nuova porta COM, scegliere questa nuova porta COM e fare clic su "Connetti" sempre in alto a destra.
Nota che nell'esempio abbiamo COM11, ma potrebbe essere diverso nel tuo caso.
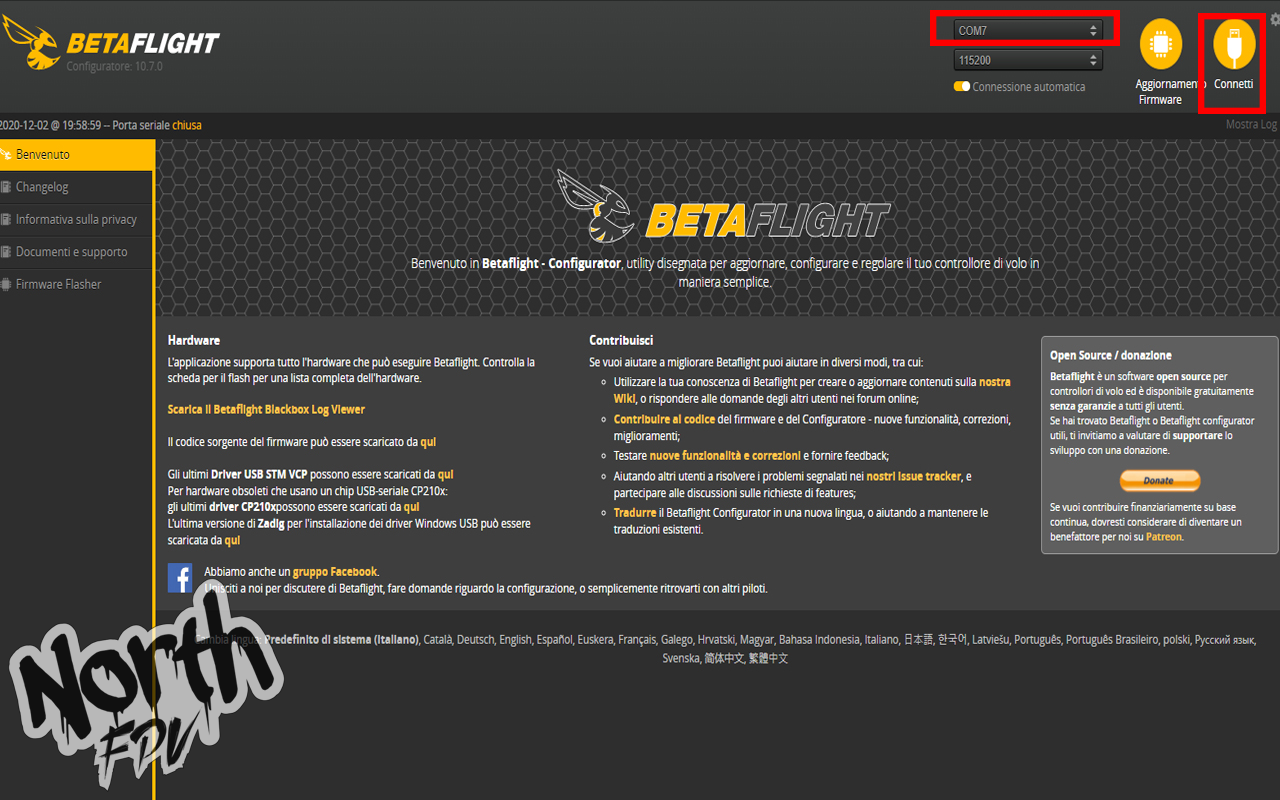
Se non trovi la porta COM o hai problemi di connessione, potrebbe trattarsi di un problema di driver.
Per riparare questo problema puoi installare questo software.
Ti basterà installarlo ed eseguirlo con il Flight Controller connesso tramite porta USB. Dopodichè dovrai chiudere Betaflight e disconnettere il drone.
Scheda Setup
Dopo esserti connesso con successo all'FC, dovresti vedere la tab (scheda) Setup. Qui hai accesso alle funzioni e alle informazioni di base sul tuo quad.
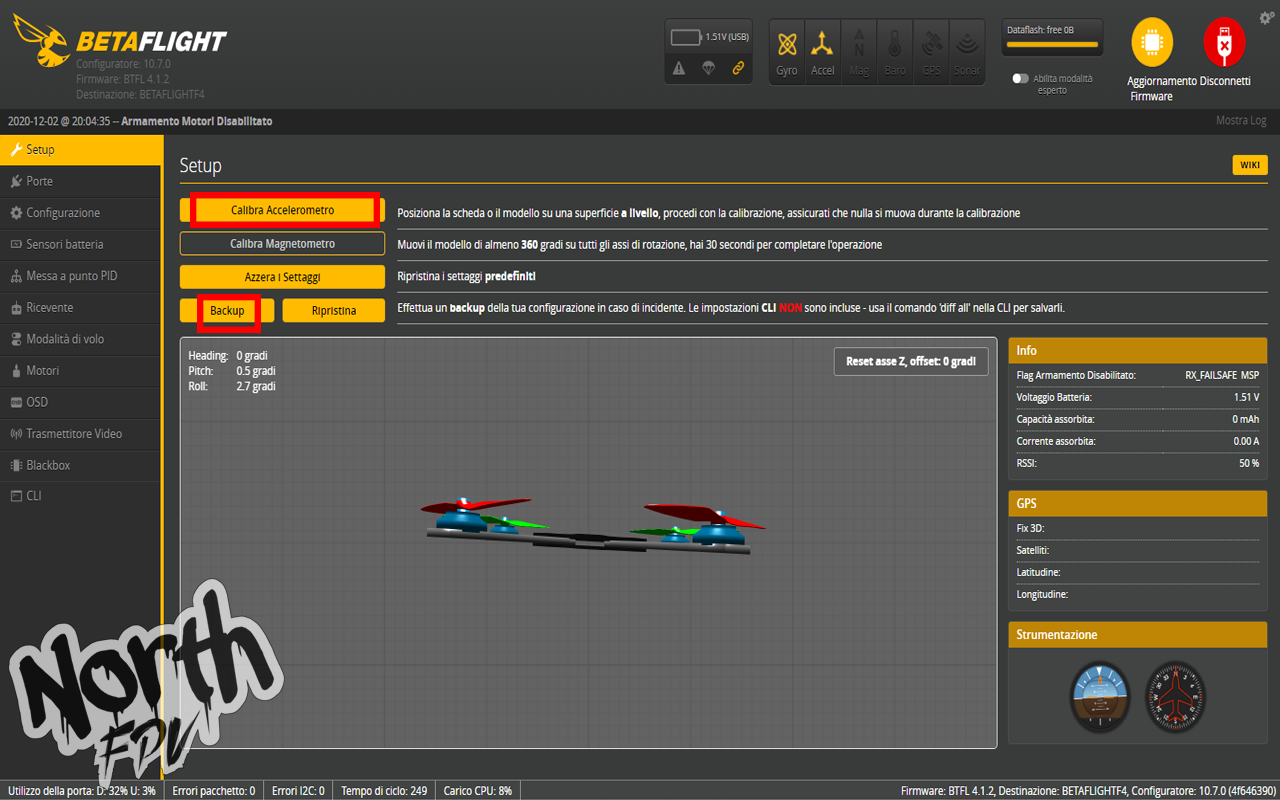
- Eseguire il backup delle impostazioni prima di modificare qualsiasi impostazione (potrebbe essere inutile se sul drone è installata una versione di Betaflight precedente)
- Posizionare il quadricoptero su una superficie piana, quindi premere "Calibra accelerometro".
- Ora tenere il quad in mano e spostarlo. Dovresti vedere il modello 3D che si muove con il quad, assicurati che il movimento sia nella stessa direzione.
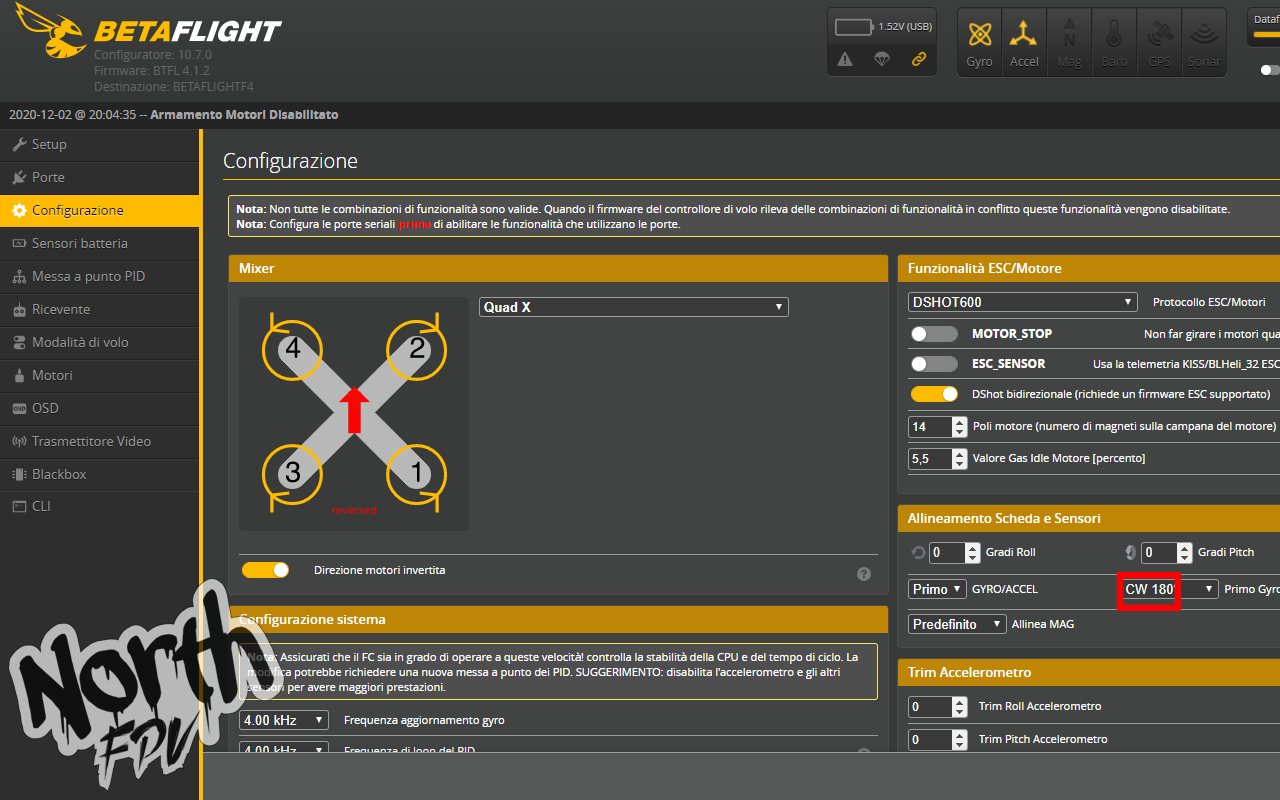
Se il modello 3D non si muove come il tuo quad, probabilmente significa che il tuo controllore di volo (FC) è installato rivolto nella direzione sbagliata ( la freccia sull'FC non punta in avanti). Puoi ruotare l'FC finché non è corretto, oppure puoi cambiare l’angolo del gyro fino a portarlo in posizione corretta tramite questa impostazione:
Porte
Nella scheda Porte è possibile configurare le periferiche: dispositivi esterni collegati al controller di volo tramite UART. Nel caso di un preassemblato non modificare questi valori.
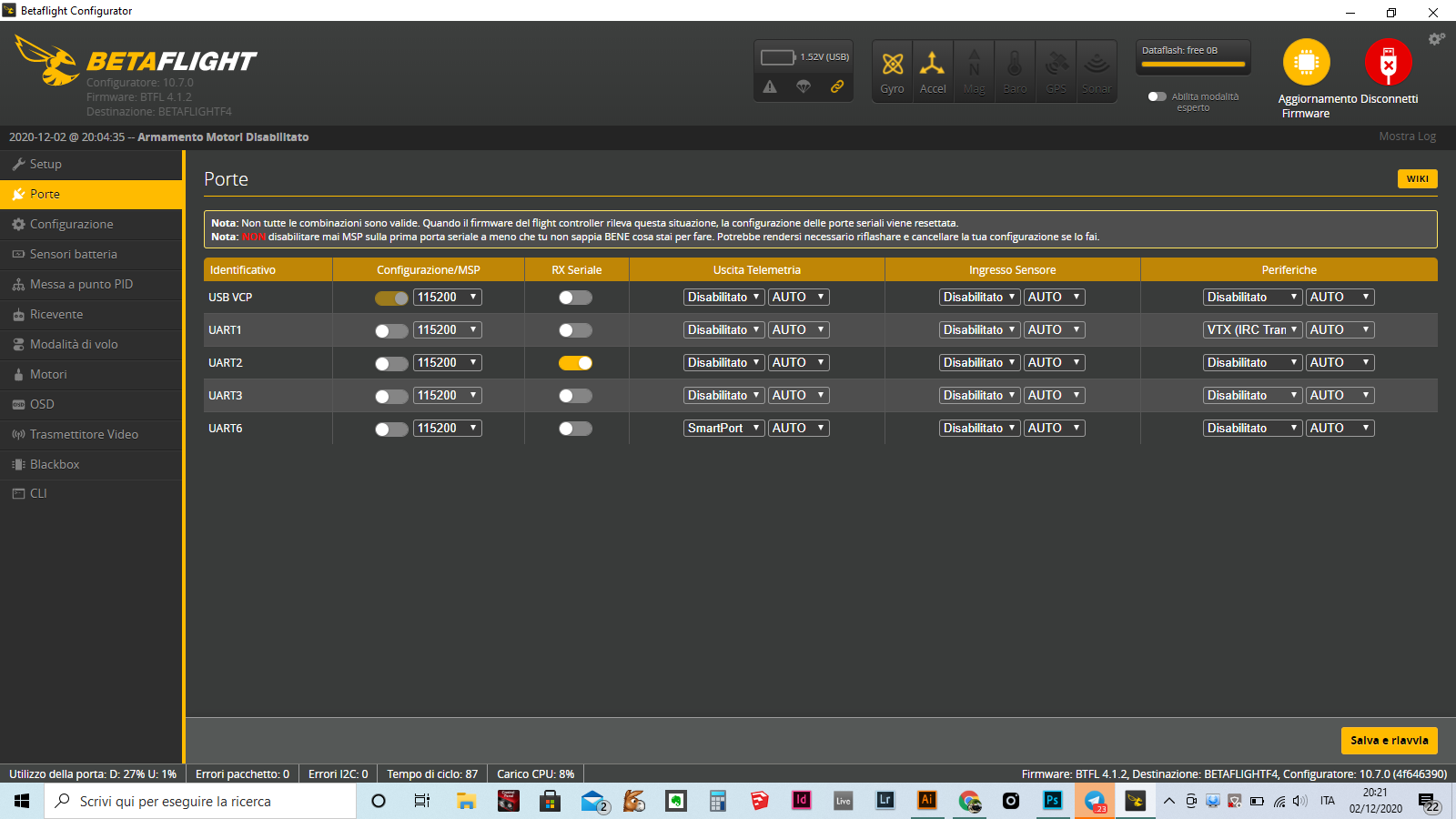
- Se si utilizza un ricevitore SBUS o IBUS, è necessario abilitare "Serial RX" sull'UART a cui è connesso l'RX.
- Se stai usando SmartPort, seleziona "SmartPort" in Telemetry Output, in corrispondenza della UART sulla quale hai saldato l’apposito cavetto della vtx altrimenti lascialo come predefinito.( all’inizio puoi farne a meno)
Configurazione
La scheda Configurazione contiene molte impostazioni di base relative alle prestazioni di volo del tuo drone.
1. Funzionalità ESC/motori
Protocollo ESC: controlla le specifiche ESC per scoprire quali protocolli supportano. Si consiglia DShot. In generale, BLHeliS ESC può eseguire DShot300 o DShot600, mentre BLHeli32 ESC può eseguire DShot1200.
Ti consigliamo di mantenere sempre disabilitata l'opzione “MOTOR_STOP”, altrimenti non sarai in grado di sapere se il tuo quad è armato.
Il resto puoi semplicemente lasciarli come predefiniti.
2. Configurazione del sistema
Frequenza di loop del pid - dipende da ciò di cui è capace il tuo FC, personalmente preferisco usare una frequenza di loop bassa, ad esempio 2 KHz su build economiche e looptime più alto 8KHz su build di qualità superiore. Ad ogni modo 2KHz dovrebbe andare bene su ogni quad.
Frequenza aggiornamento gyro - di solito dovrebbe corrispondere al tuo tempo di loop, alcune persone preferiscono avere il doppio della frequenza rispetto alla frequenza di loop del pid. Impostalo su 4KHz e Looptime a 2KHz se non sei sicuro.
Sperimenta e vedi quale looptime funziona meglio per te, non ci sono regole fisse su cosa dovresti usare.
Quando si modificano questi due valori e altre caratteristiche, prestare attenzione al "carico della CPU" nella parte inferiore della finestra, cercare di mantenerlo al di sotto del 15%. Un valore superiore a quello potrebbe causare instabilità al controllore di volo.
Accelerometro: puoi disabilitarlo, questo libererà un po 'di potenza di elaborazione, ma non sarai in grado di usare la modalità ANGLE o la modalità HORIZON e anche il modello 3D nella scheda di configurazione smetterà di muoversi. Un altro motivo per cui vuoi che sia disabilitato è per evitare problemi di armare il quad quando è troppo inclinato.
Disabilita semplicemente sia il barometro che il magnetometro.
3. Personalizzazione
Nome modello: verrà visualizzato nell'OSD di Betaflight.
4. Ricevente
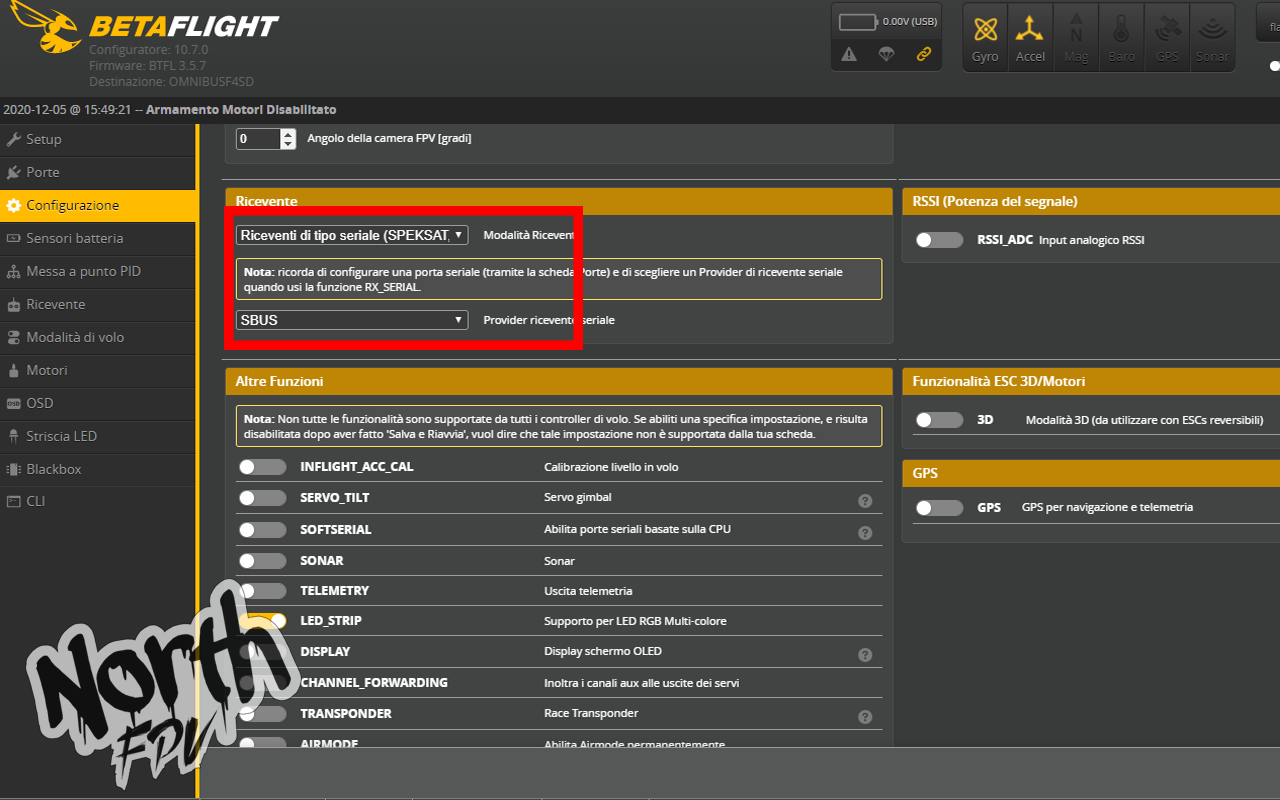
Se si utilizza SBUS, IBUS o uno Spektrum Satellite RX, selezionare "Ricevitore seriale" in modalità Ricevitore. In Serial Receiver Provider, seleziona SBUS se stai usando Frsky RX.
Se ci si connette tramite PPM, utilizzare "PPM RX Input" in modalità ricevitore. Per capire la modalità da utilizzare controllare sulle specifiche tecniche della ricevente che si installa. Nel caso di una build con ricevente preinstallata, non modificare questi valori.
5. Altre funzionalità
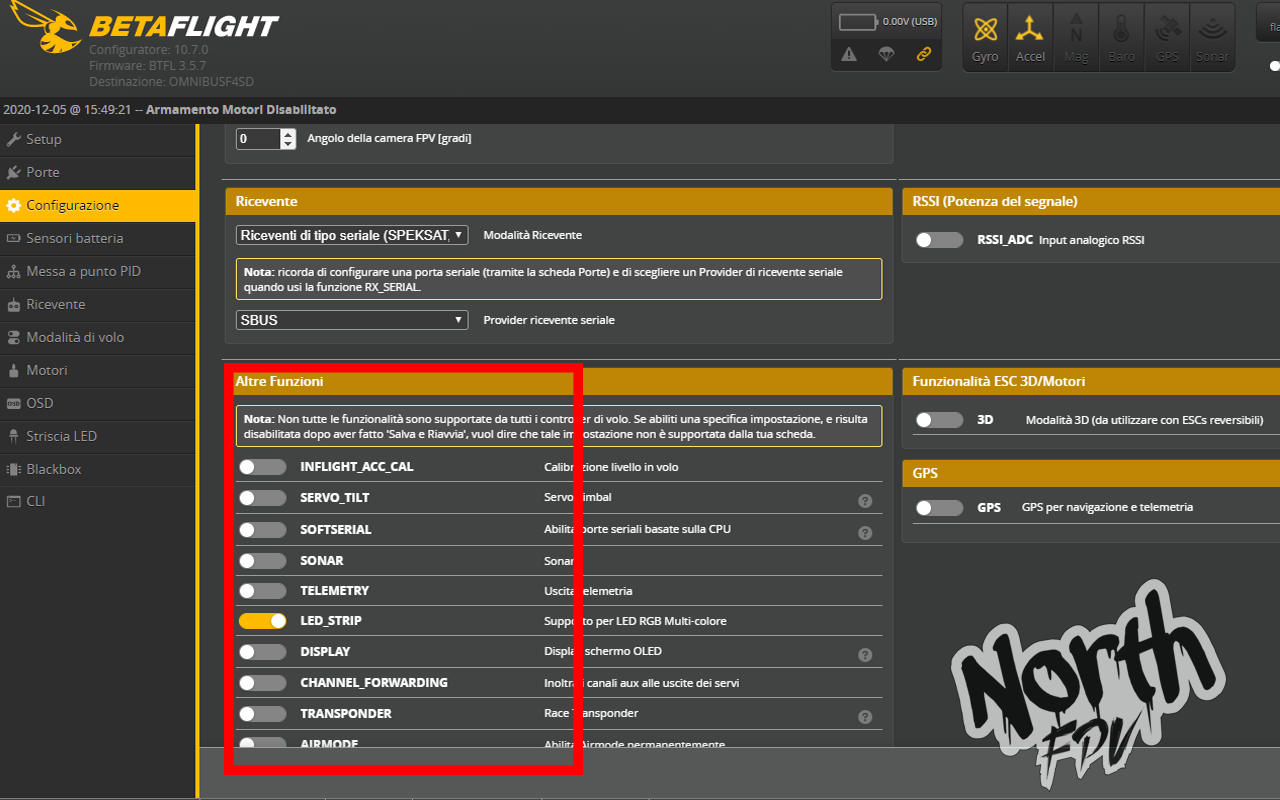
Queste sono le funzionalità che normalmente abilito in Betaflight. Se non sei sicuro, puoi semplicemente lasciarli di default, così sarai comunque in volo senza problemi.
- Anti_Gravity
- Dinamic_Filter
- Telemetria (per SmartPort)
- OSD
ti consiglio di disattivare Air Mode e di assegnare il comando ad uno switch della radio.
Fare clic su Save & Reboot.
Ricevente
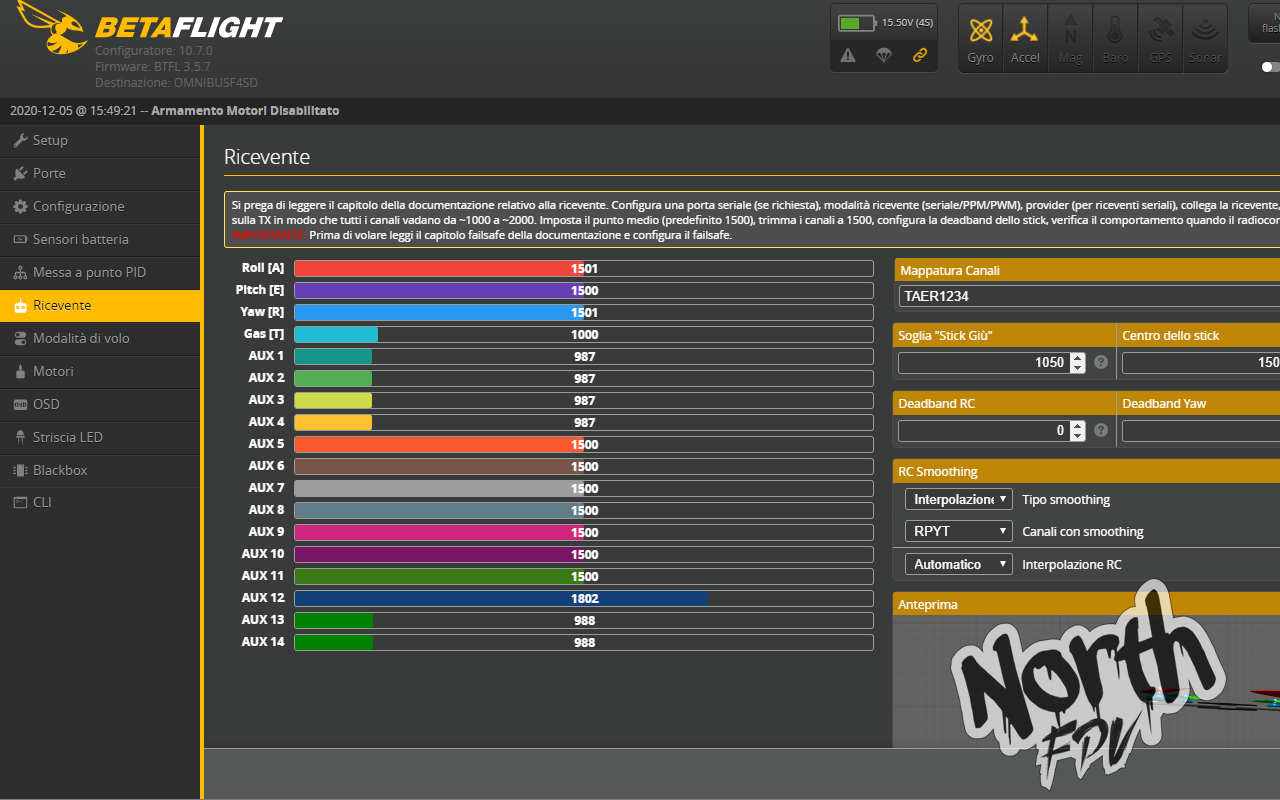
In questa scheda puoi controllare se la tua ricevente (RX) funziona correttamente. Naturalmente devi aver prima effettuato il bind.
Accendi il tuo radiocomando (TX) e RX e muovi i tuoi stick uno alla volta per vedere se il canale corrispondente si sta muovendo. Potrebbe essere necessario alimentare il tuo drone con la batteria per accendere il modulo ricevente. Potrebbe essere necessario modificare la "Mappa dei canali" se i canali sono nell'ordine sbagliato.
Se nessuno dei canali risponde, queste potrebbero essere le cause:
- l'RX è collegato al TX? (vedi una luce verde fissa sull'RX?)
- l'RX è saldato correttamente sull'FC?
- hai abilitato la ricezione seriale nella UART corretta?
- hai selezionato il protocollo RX corretto?
Ancora niente? Se ti serve aiuto, scrivici sul nostro gruppo Telegram
Dopo esserti assicurato che i canali funzionino correttamente, ora controlla i set point e end point dei primi 4 canali (Pitch, Roll, Yaw, Throttle). Questi canali dovrebbero centrarsi su 1500 e avere punti finali di 1000 e 2000.
Troverai a breve sul nostro sito il tutorial per settare queste impostazioni.
Modalità di volo
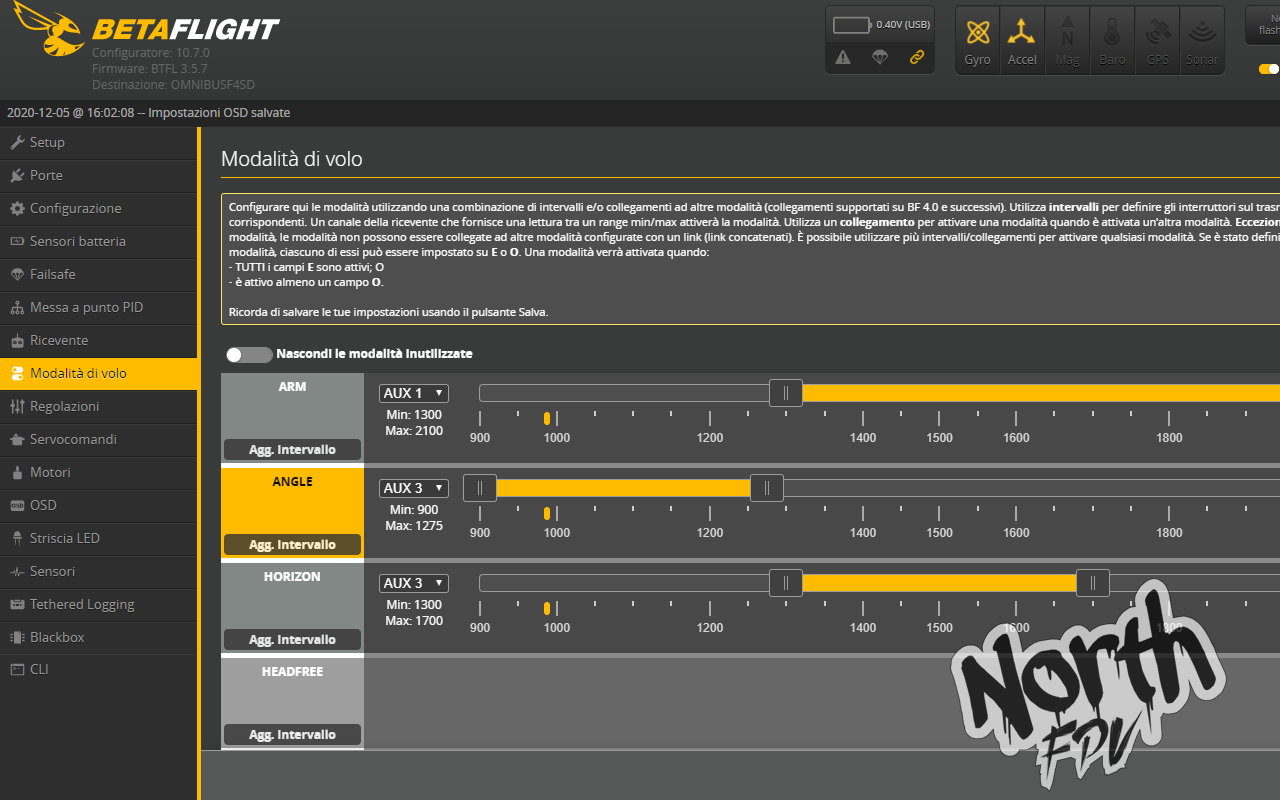
Configurazione che devono essere attivate dai canali AUX (accende il tuo TX), come ad esempio:
- Arm
- Airmode
- Modalità Angle
- Beeper
Preferisco impostare Airmode sullo stesso interruttore di della modalità Acro (senza assegnazioni), piuttosto che averlo abilitato come funzione, ma in entrambi i casi dovrebbe funzionare va bene.
Motore
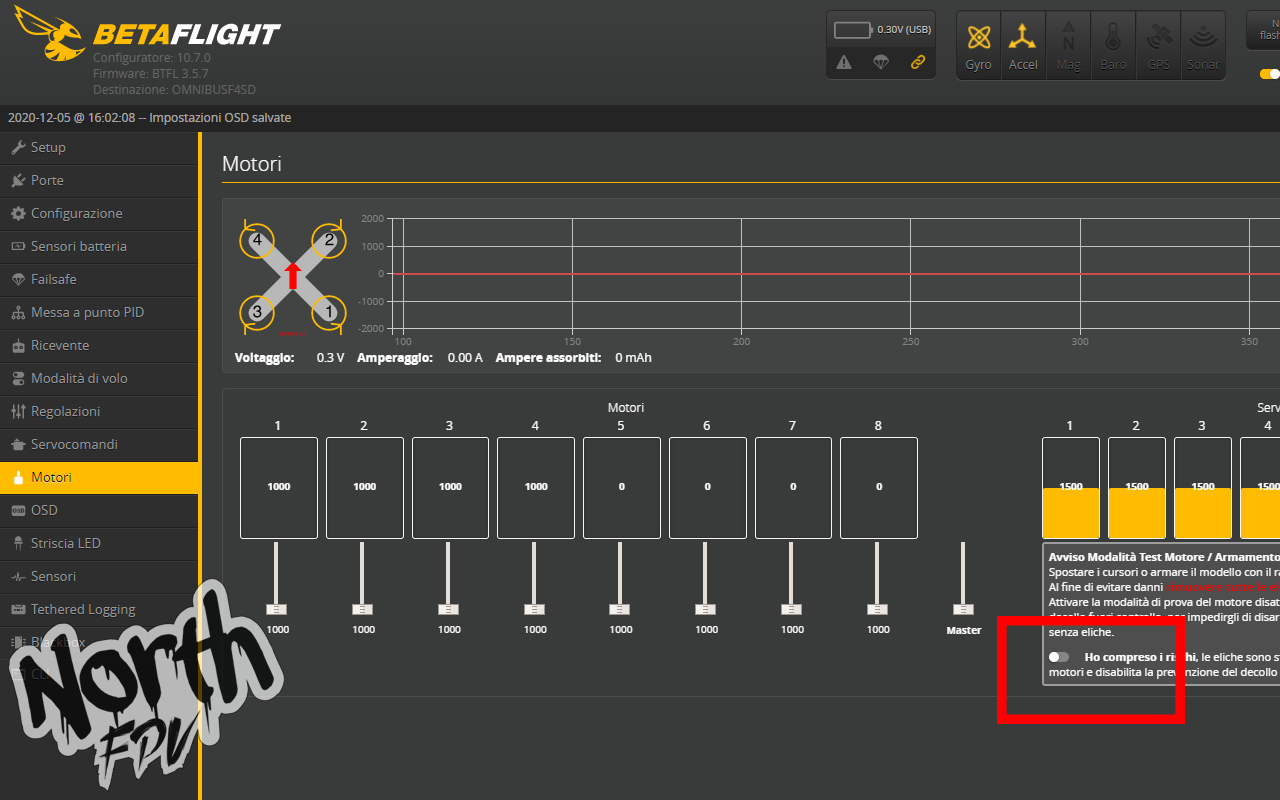
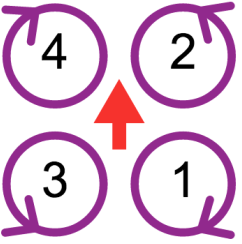
Controllare l'ordine dei motori SENZA ELICHE MONTATE. Controllare sia posizionamento (1,2,3,4) che senso di rotazione (orario e antiorario). Per fare questo è necessario attivare la modalità di test motori è con gli slider avviare un motore alla volta.
Se l'ordine è sbagliato è possibile rimappare i motori.
Ora, controlla la rotazione del motore direzione, se sbagliata, puoi invertire la direzione di rotazione in BLHeliSuite
OSD
Da questa sezione ti sarà possibile attivare le informazioni che vuoi visualizzare sullo schermo dei tuoi goggles come: voltaggio è allarmi batteria, allarmi per no arm, timer etc..
Conclusione
Questo è tutto per la configurazione di base in Betaflight.
Pensi manchi qualcosa oppure pensi di poter dare un contributo a questo articolo? Scrivici a [email protected]
Nicho Roberts
Il mio nome è Nicholas è il mondo dell'FPV mi ha affascianto dall'inzio. Ci sono un sacco di cose da imparare, per questo ho creato questi community per aiutare chi vuole iniziare con droni